1. Tekniset ominaisuudeteVTOL-moottori
In hajautettu sähköPropulsiossa moottorit pyörittävät useita potkureita tai tuulettimia siivissä tai rungossa muodostaen propulsiojärjestelmän, joka antaa lentokoneelle työntövoiman. Moottorin tehotiheys vaikuttaa suoraan lentokoneen hyötykuormaan. Moottorin teho, luotettavuus ja ympäristökestävyys ovat tärkeitä tekijöitä, jotka määrittävät sähkökäyttöisen lentokoneen dynaamiset ominaisuudet ja turvallisuuden. Sähköajoneuvojen, droonien ja eVTOL-moottoreiden valinta vaihtelee kustannusten, sovellusskenaarioiden ja muiden syiden vuoksi [1].

(Kuvalähde: Network/Safranin virallinen verkkosivusto)
1) Sähköajoneuvot: enemmän kestomagneettiasynkronimoottorit,Kestomagneettimoottorit, joilla on korkeampi hyötysuhde ja suurempi vääntömomentti, voivat tarjota paremman ajokokemuksen. Samalla kestomagneettimoottorien suuri tehotiheys voi auttaa sähköajoneuvoja saavuttamaan suuremman tehon samalla tilavuudella.
(2) Miehittämätön ilma-alus: yleisesti käytetty harjatonTasavirtamoottori.Harjaton tasavirtamoottori on kevyt ja meluisa, ja ylläpitokustannukset ovat alhaiset, mikä sopii miehittämättömien ilma-alusten lentovaatimuksiin. Toiseksi, harjattoman tasavirtamoottorin nopeus on suurempi, mikä sopii droonien nopeisiin lentotarpeisiin. Esimerkiksi DJI käyttää harjattomia moottoreita.
(3) eVTOL: Moottorin hyötysuhteelle ja vääntömomenttitiheydelle asetetut korkeat vaatimukset tekevät kestomagneettitahtimoottoreista erittäin lupaavan ratkaisun sähköpropulsiojärjestelmään, koska aksiaalivuoisella kestomagneettimoottorilla on korkea säteittäisen tilan käyttöaste, ja tehotiheydellä ja vääntömomenttitiheydellä on etuja pienen pituus-halkaisijasuhteen tapauksessa. Nykyiset sähköiset VTOL-lentokoneet, kuten Joby S4 ja Archer Midnight, käyttävät kaikki kestomagneettitahtimoottoreita [1].
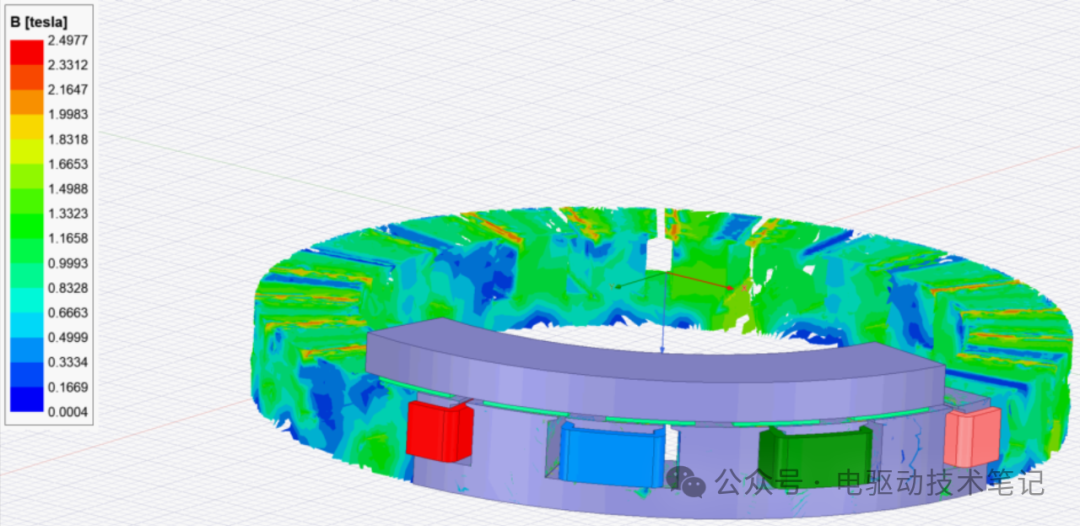
Seuraava kuva esittää pilvikuvan kiinteän roottorin magneettisen induktiointensiteetistä yksistaattorisessa yksiroottorisessa aksiaalivuomoottorissa
Seuraava kuva on sähkölentokoneiden ja sähköajoneuvojen moottoriparametrien vertailu

2.eVTOL-moottorin kehitystrendi
Tällä hetkellä eVTOL-sähköjärjestelmän pääasiallinen kehitystrendi on vähentää moottorin rakenteen ja jäähdytysjärjestelmän apupainon painoa parantamalla sähkömagneettista suunnitteluteknologiaa, lämmönhallintateknologiaa ja kevytteknologiaa sekä parantaa jatkuvasti moottorin tehotiheyttä ja tehontuottokykyä laajalla vaihtelevien olosuhteiden alueella. "Lentävien autojen ja avainteknologioiden tutkimus- ja kehitystyön" mukaan lentokoneiden propulsiomoottorit ovat pystyneet nostamaan moottorin rungon nimellistehon tiheyden yli 5 kW/kg:iin käyttämällä korkeampien lämpötilarajojen omaavia eristysmateriaaleja, korkeamman magneettisen energiatiheyden omaavia kestomagneettimateriaaleja ja kevyempiä rakennemateriaaleja. Parantamalla moottorin sähkömagneettista rakennesuunnittelua, kuten Halbachin magneettimatriisin, rautaisen ytimen puuttumisen, Litz-lankakäämityksen ja muiden tekniikoiden käyttöä, sekä parantamalla moottorin lämmönpoistosuunnittelua, moottorin rungon nimellistehon tiheyden odotetaan nousevan 10 kW/kg:iin vuonna 2030 ja nimellistehon tiheyden ylittävän 13 kW/kg:iin vuonna 2035 [1].

3. Täyssähköisten ja hybridireittien vertailu
Verrattuna puhtaasti sähköiseen reittiin ja hybridireittiin, nykyisten asiaankuuluvien valmistajien valikoimasta kotimainen eVTOL-projekti perustuu pääasiassa puhtaasti sähköiseen järjestelmään, jota rajoittaa litiumioniakkujen energiatiheys, ja alhaisen matkustajakapasiteetin ansiosta eVTOL on paras laskeutumispaikka puhtaasti sähköiselle propulsioteknologialle. Ulkomailla jotkut valmistajat ovat laatineet hybridisuunnitelman etukäteen ja ottaneet johtoaseman useissa testaus- ja iterointikierroksissa. Kuten seuraavasta taulukosta voidaan nähdä, hybridijärjestelmä on selvästi vahvempi kestävyyskulman suhteen ja voi tulevaisuudessa saavuttaa enemmän sovelluksia keskipitkien ja pitkien matkojen sekä matalan korkeuden liikenteen skenaariossa [1].
Julkaisuaika: 27. helmikuuta 2025