1. tekniset ominaisuudetEvtol -moottori
In hajautettu sähköVoimakkuus, moottorit ajavat useita potkureita tai siipien tai rungon puhaltimia muodostaakseen työntöjärjestelmän, joka tarjoaa ilma -aluksen. Moottorin tehotiheys vaikuttaa suoraan lentokoneen hyötykuormakapasiteettiin. Moottorin tehon tuotantokapasiteetti, luotettavuus ja ympäristön sopeutumiskyky ovat tärkeitä tekijöitä sähköisen lentokoneen dynaamisten ominaisuuksien ja turvallisuuden määrittämiseksi. Sähköajoneuvojen, droonien ja Evtol -moottorien valinta on erilainen erilaisten kustannusten, sovellusskenaarioiden ja muiden syiden vuoksi [1].

(Valokuvan lähde: Network/Safranin virallinen verkkosivusto)
1) Sähköajoneuvot: pysyvämpi magneettisynkroniset moottorit,Pysyvät magneettimoottorit, joilla on suurempi tehokkuus ja korkeampi vääntömomentti, voivat tarjota paremman ajokokemuksen. Samanaikaisesti pysyvien magneettimoottorien suuritehokkuus voi myös auttaa sähköajoneuvoja saamaan suuremman virran samassa määrässä.
(2) UAV: Yleisesti käytetty harjatonDC -moottori.Harjaton DC -moottori on alhainen paino ja melu, ja ylläpitokustannukset ovat alhaiset, mikä soveltuu UAV: ien lentovaatimuksiin; Toiseksi harjattoman tasavirtamoottorin nopeus on korkeampi, mikä sopii droonien nopeaan lentotarpeeseen. Esimerkiksi DJI käyttää harjattomia moottoreita.
(3) EVTOL: Moottorin hyötysuhteen ja vääntömomentin tiheyden korkeammat vaatimukset, pysyvä magneetti -synkroninen moottori on erittäin lupaava ratkaisu sähköisen työntövoiman tehojärjestelmälle, koska aksiaalivuon pysyvällä magneettimoottorilla on korkea säteittäisen tilan käyttöaste ja tehotiheys ja vääntömomentin tiheys on etuja pienen pituisen halkaisijan ratken tapauksessa. Nykyiset sähköiset VTOL -lentokoneet, kuten Joby S4 ja Archer Midnight, kaikki omaksuvat pysyvät magneetti -synkroniset moottorit [1].
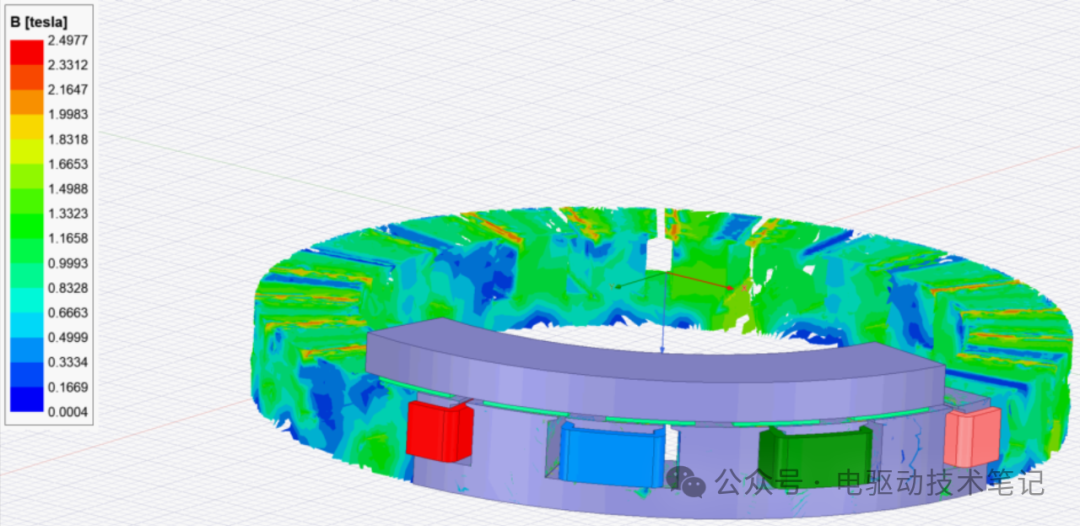
Seuraava kuva näyttää yhden staattorin yhden roottorin aksiaalivirheen moottorin kiinteän roottorin magneettisen induktion voimakkuuden pilvikuvan
Seuraava kuva on sähköisten lentokoneiden ja sähköajoneuvojen moottorin parametrien vertailu

2. EVTOL -moottorin kehityssuuntaus
Tällä hetkellä EVTOL -sähköjärjestelmän tärkein kehityssuuntaus on vähentää moottorirakenteen painoa ja jäähdytysjärjestelmän apupainoa parantamalla sähkömagneettista suunnittelutekniikkaa, lämmönhallintatekniikkaa ja kevyttä tekniikkaa ja parantamalla jatkuvasti moottorin tehotiheyttä ja monenlaisten muuttuvien olosuhteiden tehotiheyttä. ”Lentävien autojen ja avainteknologioiden tutkimuksen ja kehityksen mukaan ilmailun työntömoottori on kyennyt tekemään moottorirungon nimellistehokkuuden yli 5 kW/kg käyttämällä eristysmateriaaleja, joilla on korkeammat lämpötilarajoitukset, pysyvät magneettimateriaalit, joilla on korkeampi magneettinen energiatiheys ja kevyemmät rakenteelliset materiaalit. Parannalla moottorin sähkömagneettisen rakenteen suunnittelua, kuten Halbach -magneettisen taulukon, ei rautaydinrakennetta, Litz -lankakävelyä ja muita tekniikoita, sekä parantamalla moottorin lämmön hajoamisen suunnittelua, odotetaan, että moottorin rungon nimellistiheys voi saavuttaa 10 kW/kg 2030: ssa ja 2035: n nimellistehoa. 135.

3. Puhtaan sähkö- ja hybridi -reittien vertailu
Verrattuna puhdasta sähköreittiä ja hybridireitiä, asiaankuuluvien valmistajien nykyisestä valinnasta, kotimainen EVTOL-projekti perustuu pääasiassa puhtaan sähköjärjestelmään, jota rajoittaa litium-ioni-akkujen energiatiheys ja alhaisen matkustajan kapasiteetti EVTOL on puhdasta sähköisen työntövoiman tekniikan paras laskupaikka. Jotkut valmistajat ovat ulkomailla laatineet hybridisuunnitelman etukäteen ja ovat ottaneet johtoaseman monilla testaus- ja iteraatiokierroksilla. Kuten seuraavasta taulukosta voidaan nähdä, hybridijärjestelmä on tietysti vahvempi kestävyyskulmassa ja voi saavuttaa enemmän sovelluksia keskikokoisen etäisyyden ja matalan korkeuden liikenteen skenaariossa tulevaisuudessa [1].
Viestin aika: helmikuu-27-2025